Le Robot
Que doit faire le robot?
Le robot que nous avons créer est construit pour participer au jeu du compétition robotique CRC, appelé AVIA
2023. Cet année, il a lieu à l'école secondaire Curé-Antoine-Labelle, du 16 au 18 Février.
Le robot que nous avons crée a été construit pour participer dans Robotique CRC, appelé AVIA 2023. Cet année, il
a lieu à l’école secondaire Curé-Antoine-Labelle, du 16 au 18 Février.
Le but d'AVIA 2023 est simple: de marquer plus de points que vos adversaires. Votre robot participe avec un
autre robot contre deux autres robots; une équipe est bleue et une équipe est jaune. Des points peuvent être reçus
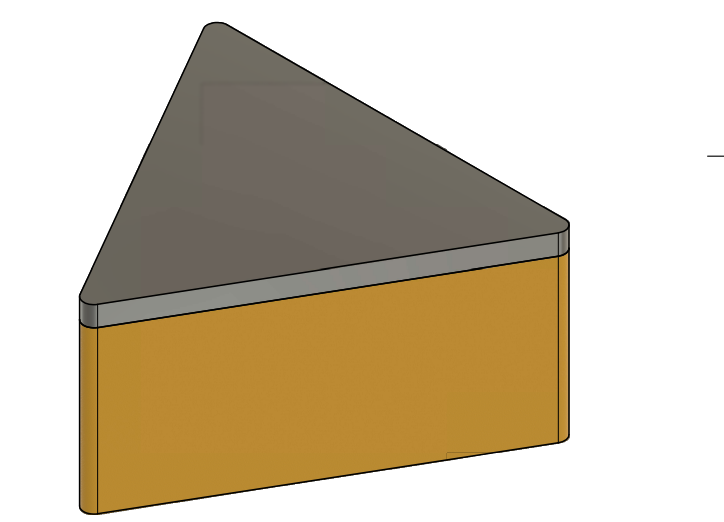
en fonction du placement des pièces de jeu, dans l’image à gauche. Quand la pièce montre le côté bleue, l'équipe
bleue reçoit des points, et vice versa. Les points peuvent être reçus avec trois actions différentes: par laisser
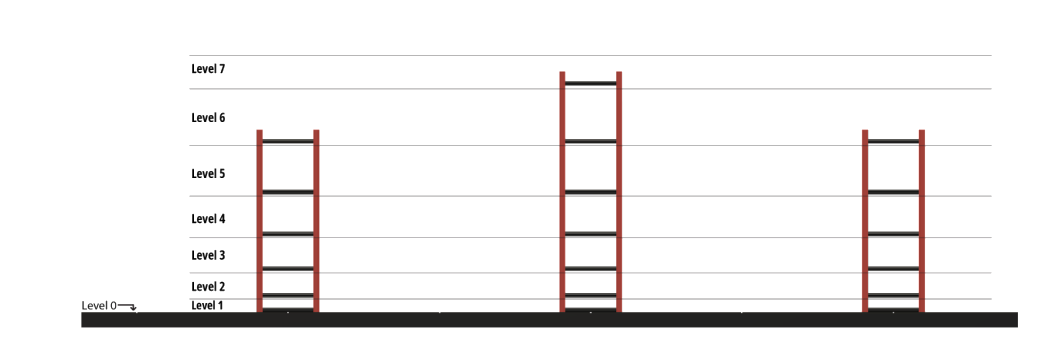
des pièces de jeu sur le plancher, en mettant les pièces dans des tours, dans l’image à gauche, et en empilant des
pièces de jeu sur la zone multiplicatrice. Chaque pièce laissée sur le plancher vaut 35 points. Les points pour
les pièces dans les tours fonctionnent différemment. Dans les tours, les pièces de jeu doivent être misent
entièrement, de bas en haut. Cela peut être particulièrement difficile car les tours peuvent attaindre jusqu'à
sept pieds de haut! Comme c'est plus difficile de mettre les pièces plus haut dans les tours, les pièces qui sont
plus haut sur le tour vaut plus. Les pièces sur l'étage le plus bas valent 10 points, et chaque étage plus haut
vaut double les points que l'étage en-dessous. Ça veut dire qu'un pièce sur l'étage la plus haute sur la tour vaut
640 points!
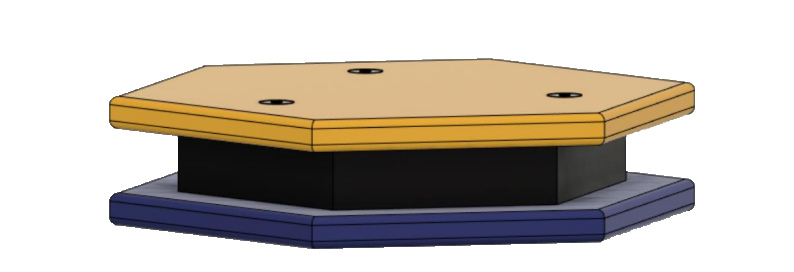
Le dernier moyen de gagner des points est à travers de la zone multiplicatrice. Pour obtenir la multiplicatrice,
une équipe doit empiler une pile de pièces de jeu sur un piedestal, de la forme de l'image sur la gauche, plus
haut que son adversaire. Bien que l'image puisse sembler grand, le piedestal n'est en réalité que d'environ quatre
pouces de large! L'équipe qui peut empiler ses pièces de jeu plus haut obtiendra un multiplicateur de 1,5X sur
tous les autres points qu'elle gagne.
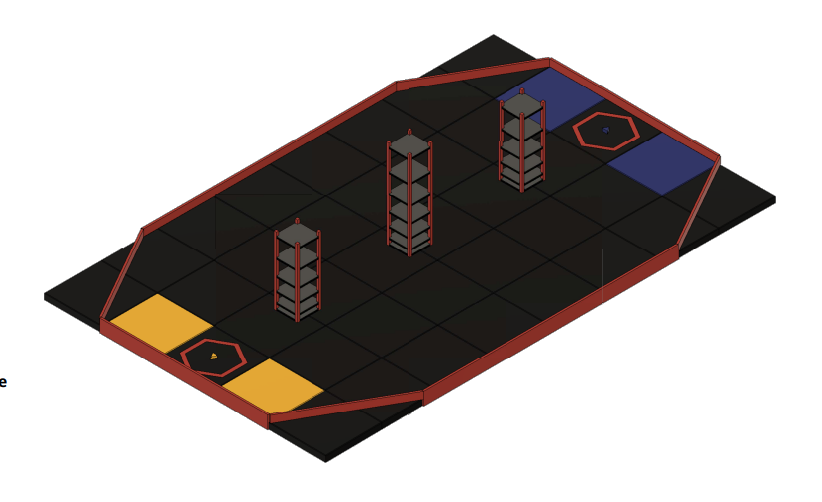
Le jeu se déroule à l'intérieur du terrain de jeu, montrée sur la droite. Chaque robot doit commencer dans l'un
des grands carrées sur le sol de la même couleur. Quant aux pièces de jeu, 20 d'entre elles commencent sur leurs
côtés autour de la zone de jeu, et le reste sont déposées en quatre piles de 10 pièces de jeu. De ces 60 pièces de
jeu, l'une d'entre elles a un centre qui est rouge. Cette pièce, lorsqu'elle est placée sur une tour, annule les
points de chaque pièce en-dessous.

Le processus de construction du robot a été divisé en 3 grandes parties : Idéation, Prototypage et
Construction.
Le remue-méninges a été fait en personne, lors des premières réunions du club (après le coup d'envoi) au cours
du
semestre d'automne 2022. Le prototypage comprend également la conception des composantes du robot en CAO, puis
la
construction des premiers prototypes de ces composants une fois les pièces arrivées. La Construction se mélange
en
quelque sorte avec le Prototypage, dans le sens où il n'y a pas eu de "fin" définitive de la phase de
Prototypage.
La Construction a simplement commencé une fois que chaque composante principale a été conçue, testé et après
verification de sa fonctionalitée. La Construction consiste alors à fixer les principales composantes entre
elles
et au châssis du robot.
Nous avons divisé l'équipe de construction robotique en groupes pour travailler sur les différentes
composantes
du robot : la "pince/retourneuse", qui est simplement une pince de crabe qui ramasse et fait pivoter les pièces
de
jeu à 180 degrés, le mécanisme de soulèvement, qui est un ascenseur en cascade qui utilise des moteurs à couple
élevé pour un treuil, qui étend et contracte une série d'extrusions d'aluminium coulissantes et imbriquées, et
enfin le châssis, qui contient le groupe motopropulseur et l'immobilier sur lequel monte l'ascenseur.
Au moment de la rédaction de cet article, l’ascenseur et la pince/retourneur n'ont pas encore été assemblés
sur
le châssis, principalement car le châssis est incomplet. Quelques commandes de pièces ont fini par coûter
beaucoup
plus cher que prévu en termes d'expédition, ce qui explique que nous n’avons plus d'argent pour commander de
nouvelles pièces. Cela signifie que nous devrons monter l’ascenseur sur le châssis à l'aide d'extrusions
d'aluminium (dont nous avons beaucoup qui traînent depuis l'année dernière).
Un autre problème que nous avons rencontré était de rester dans les limites de largeur du robot. Le châssis a
été conçu pour « enrouler » le préhenseur afin de le protéger des collisions, et également pour maintenir le
robot
dans les limites de longueur. Lorsque nous avons conçu le châssis, nous n'avions pas optimisé la largeur
intérieure du châssis pour qu'il s'adapte autour des tours dans lesquelles les pièces de jeu devront s'insérer.
Nous avons donc dû augmenter la longueur des barres transversales. Le problème que nous avons encontré est que
nous ne pouvons pas augmenter la longueur de la barre transversale que d'une petite quantité, sinon nous serons
en
dehors des limites de largeur. Nous devrons donc faire des calculs pour trouver la longueur optimale des barres.

Quelques choses que l'équipe a appris au cours du processus de construction du robot de cette année : Tout
d'abord, essayer de rester local lors de l'approvisionnement en pièces. Une grande partie du budget a été perdu
en
raison des frais d'expédition alors que nous aurions pu les acheter dans un magasin de matériel ou
d'électroniques
local. De plus, la conception de pièces en CAO a pris beaucoup plus de temps que prévu, il est donc important de
faire travailler le plus de personnes possible sur les conceptions CAO, le plus tôt possible.
L'équipe a vraiment apprécié les remue-méninges et la réflexion en groupe. C'était incroyablement prometteur
de
voir autant de personnes imaginer des idées et des plans extraordinaires.
La composante la plus irritante est sans aucun doute le châssis, car les limites de largeur et le matériel
limité nous ont obligés à faire preuve de créativité.
Nous avons tous sacrifié notre temps libre pour concevoir des prototypes en CAO, et la plupart de nos pauses
tout au long du semestre ont été passées dans la salle du club, à bricoler. Nous avons également utilisé
l'imprimante 3D personnelle d’un de nos membres pour imprimer des pièces pour des prototypes.